随着全球人口老龄化进程加速和慢性病发病率上升,康复医疗需求日益增长。传统康复治疗高度依赖治疗师,存在人力成本高、训练强度与精度难以标准化等挑战。康复机器人作为一种融合了机器人学、生物力学、临床医学与人工智能的智能康复设备,正成为健康医疗产品设计领域的前沿热点。它不仅能提供高强度、重复性、精准化的训练,还能通过数据采集与分析,实现个性化康复方案的制定与动态调整,极大地提升了康复效率与效果。
康复机器人设计的核心原则
成功的康复机器人设计并非简单的机械叠加,而是需要遵循以下核心原则:
- 以用户为中心:设计需充分考虑患者(用户)的生理、心理状态及使用场景。例如,对于上肢功能障碍者,设备需轻便、符合人体工学;对于下肢康复,则需确保极高的安全性与稳定性。人机交互界面应简洁直观,降低学习成本。
- 安全至上:机器人直接与患者身体接触并施加力,必须内置多重安全机制,如力/力矩传感器、急停按钮、软件限位、防碰撞设计等,确保在任何异常情况下都能立即停止或切换到安全模式。
- 主动参与与动机激励:现代康复理念强调患者的主动参与。因此,设计常融入游戏化(Gamification) 元素和虚拟现实(VR)技术,将枯燥的训练转化为有趣的互动任务,通过实时视觉反馈和成就系统,持续激励患者。
- 数据驱动与个性化:内置传感器持续采集运动范围、力度、耐力、协调性等数据,通过算法分析,为治疗师提供客观评估报告,并能自动调整训练难度与模式,实现“一人一策”的个性化康复。
- 临床有效性与循证支持:设计必须基于坚实的临床医学证据,并与康复医师、治疗师紧密合作,确保其训练模式符合神经可塑性原理和运动学习理论,真正促进功能恢复。
多款创新康复机器人设计案例展示
以下案例展示了不同功能定位的康复机器人如何将上述原则转化为实际产品。
案例一:上肢康复机器人——以“镜像疗法”与AI适配为特色
产品概览:一款针对中风后偏瘫患者的上肢(特别是手部与腕部)精细化功能康复机器人。
设计亮点:
- 仿生结构与柔性驱动:采用外骨骼式轻量化设计,材质亲肤透气,关节自由度模拟人手自然运动。采用柔性气动或电机驱动,提供柔顺、自然的助力或阻力。
- 集成“镜像疗法”:设备配备屏幕,当患者尝试移动患侧手臂时,系统通过识别健康侧手臂的微小意图(如肌电信号),驱动患侧执行相同动作,并在屏幕上以虚拟形象对称展示,从视觉和运动上强化大脑对患侧的控制信号,促进神经通路重建。
- AI自适应难度系统:内置AI算法根据患者每次训练的表现(如完成度、颤抖程度、疲劳指标),实时微调辅助力的大小、任务复杂度及虚拟场景的挑战性,确保训练始终处于“最近发展区”,既不会因太简单而无效,也不会因太困难而挫伤信心。
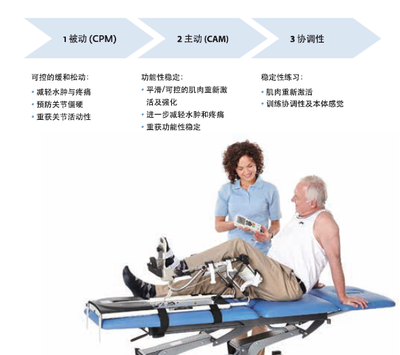
案例二:下肢康复外骨骼机器人——专注于步态重建与社区/家庭应用
产品概览:一款可穿戴式下肢外骨骼机器人,旨在帮助脊髓损伤、脑卒中或肌无力患者重新站立和行走。
设计亮点:
- 多模态步态训练:提供“全辅助步态”、“助力随动”和“阻抗训练”多种模式。在早期,机器人完全带动患者腿部完成标准生理步态;随着功能恢复,系统逐渐减少助力,甚至增加可控阻力,鼓励患者主动发力。
- 轻量化与动力优化:采用高强度碳纤维框架和高能量密度电池,大幅减轻自重,延长单次使用时间。驱动单元位于髋、膝关节,算法能智能识别用户意图(如身体重心微移),实现人机步态的柔顺同步。
- 家庭友好型设计:相较于大型落地式步态训练设备,此款设计紧凑,配备易用的手持控制器和APP,支持患者在家庭或社区环境中进行日常训练,并可将数据同步至云端,供远程康复团队监督指导,实现了从医院到家庭的康复连续性。
案例三:手功能康复机器人——聚焦于抓握与精细动作
产品概览:一款桌面式或可穿戴式手部康复机器人,针对手部屈伸、抓握、对指等精细动作进行训练。
设计亮点:
- 模块化与可定制:设计考虑到手部功能障碍的多样性(如仅手指无力、或全手僵硬),采用模块化结构,可以针对单个或多个手指进行组合训练。治疗师可根据评估结果快速配置训练模块。
- 沉浸式VR任务训练:结合高精度动作捕捉与VR头盔,患者可在虚拟场景中进行诸如抓取虚拟水果、拧开瓶盖、弹奏钢琴等丰富多样的功能性任务。这种情境化训练能更好地激发运动皮质活性,促进功能向日常生活转移。
- 生物反馈与社交连接:设备能将肌电信号或运动数据转化为直观的视觉(如能量条增长)或听觉反馈。部分设计还支持多患者在线进行协作性游戏,在康复过程中融入社交元素,减轻孤独感,提升坚持训练的意愿。
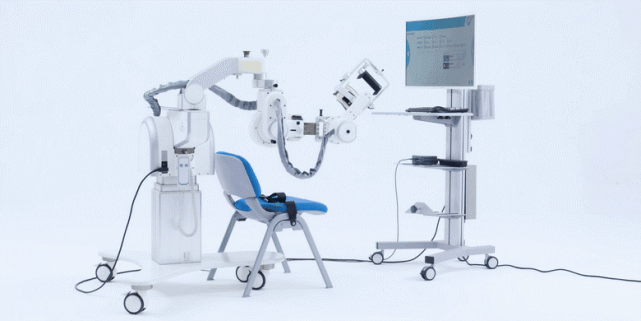
案例四:全身康复机器人平台——多关节联动与平衡训练
产品概览:一种大型、多自由度的悬吊式或座椅式机器人系统,用于进行躯干核心稳定性、坐站转移、以及多关节协调性训练。
设计亮点:
- 三维空间运动支持:平台可在三维空间内提供支撑、减重和运动引导,允许患者进行前后、左右、旋转乃至失状面内的复合运动,模拟日常生活中复杂的重心转移和姿势调整。
- 实时平衡评估与训练:通过底部的力平台和全身运动传感器,精确量化患者的压力中心、摇摆幅度等平衡参数,并即时生成动态平衡挑战任务(如“接住”屏幕上飞来飞去的球),实现动态平衡能力的量化训练。
- 一体化评估与训练:系统集成了标准化评估模块,可在训练前后自动完成 Fugl-Meyer、Berg平衡量表等部分项目的自动化评估,生成对比报告,极大提高了临床工作效率。
未来趋势与展望
康复机器人的设计将向更智能化、柔性化、融合化与普惠化发展:
- 脑机接口(BCI)的深度集成:通过直接解读大脑或神经信号来控制机器人,为重度瘫痪患者提供全新的康复路径。
- 软体机器人技术:采用柔性材料与驱动方式,使设备更贴合人体,安全性更高,体验更舒适。
- 数字孪生与元宇宙康复:为患者创建其身体功能的数字孪生模型,在元宇宙中进行超前模拟训练与效果预测。
- 成本控制与普及:通过优化设计、模块化和规模化生产,降低设备成本,让先进康复技术惠及更多基层医疗机构和家庭。
康复机器人作为健康医疗产品的杰出代表,正通过精妙的设计将冰冷的科技转化为有温度的康复力量。它不仅是功能的延伸,更是希望与独立的赋予者,深刻诠释着“设计为人”的本质,引领着康复医疗进入一个更精准、更高效、更人性化的新时代。